
GD32F4 MCU适配Betaflight飞控软件操作步骤,请参考以下指南
GD32F4 Betaflight飞控软件支持功能
GD32F4作为无人机飞控的核心控制单元,其主控采用Arm® Cortex®-M4内核,主频高达240MHz。GD32F4通过I2C、SPI、UART等通信接口,为无人机飞控提供高效的数据交互和控制能力,可以便捷接入陀螺仪、气压计、GPS,MAG、图传等外围传感器;通过TIMER PWM实现高效的电机驱动信号以及精准的信息遥测,在飞行过程中实现稳定控制的同时,实时进行数据的采集和获取。
以下为GD32F4飞控软件支持功能示意图:

GD32F4 MCU适配Betaflight飞控软件注意事项
GD32F4 MCU已适配Betaflight飞控软件,相关代码现已开源并发布于GitHub平台。目前,GD32F4主要支持Betaflight 4.5.1与Betaflight master两个分支,开发时请先切换至对应分支。需要注意的是,推荐在Ubuntu 22.04环境中进行开发,请先安装所需编译依赖,将GitHub仓库代码下载至本地即可开始开发工作。
GD32F4 Betaflight地面站(网页版)配置
当前Betaflight地面站网页版已经支持GD32F4飞控的连接,网页版链接如下:
https://app.betaflight.com/
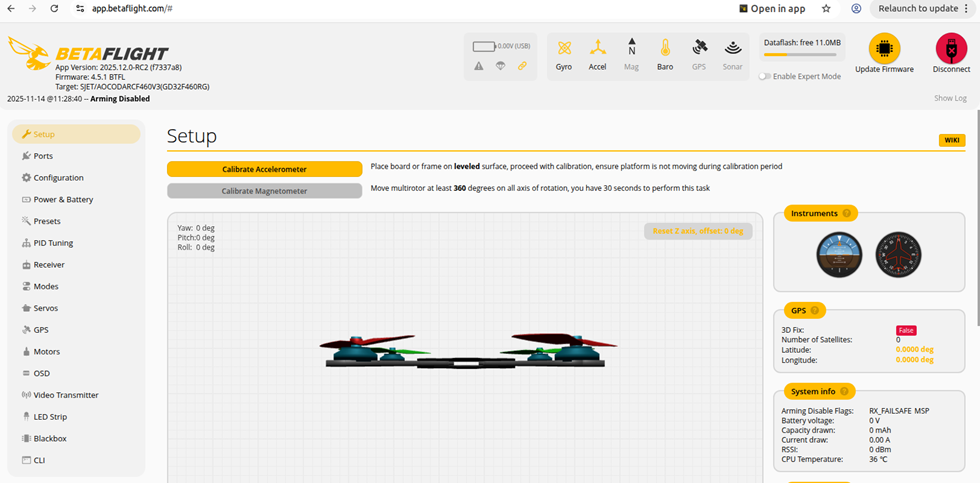
使用USB线将GD32F4飞控连接至电脑,并启动Betaflight地面站(网页版)与其建立连接。连接成功后,即可通过地面站对飞控进行全面配置,例如设置端口、调整PID与频率、为接收机对频,以及配置灯带、电机和遥测输出等。
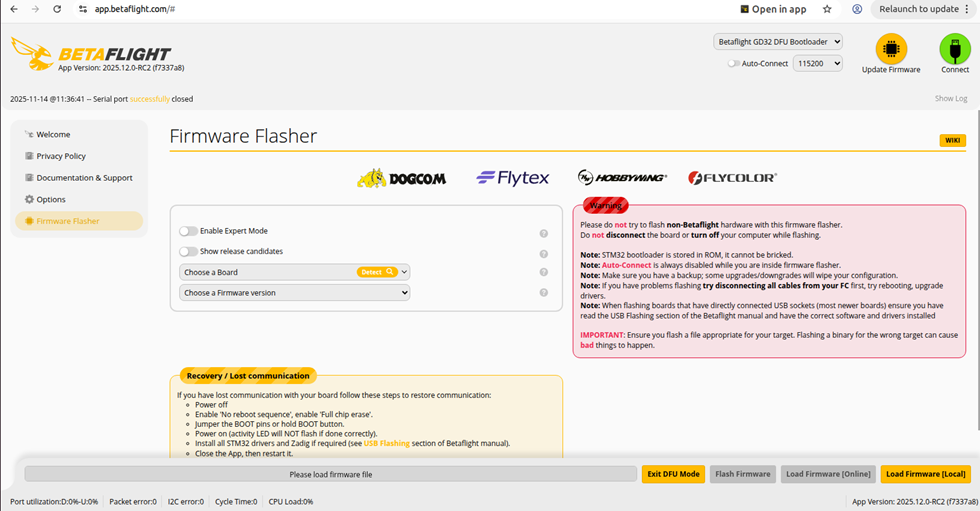
将飞控置于BOOT模式后,即可通过Betaflight地面站为GD32F4飞控更新固件。
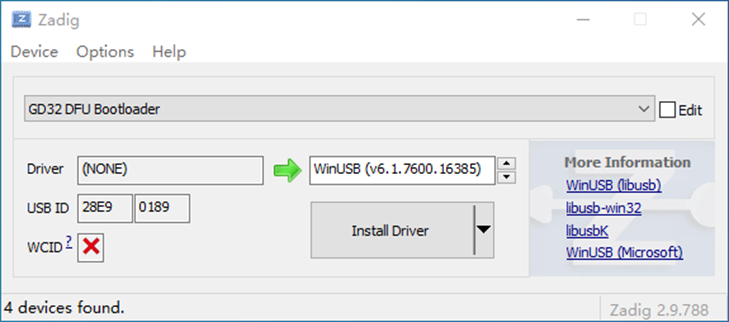
请注意,在Windows系统下使用Betaflight地面站更新固件前,必须使用Zadig工具将“GD32 DFU Bootloader”的驱动程序更新为WinUSB,否则地面站将无法正确识别到飞控设备。
同样,在Ubuntu下使用Betaflight地面站对GD32F4飞控进行固件更新前,需要对GD32 DFU设置udev权限,以便地面站能识别GD32 DFU设备。
Ubuntu中设置步骤如下:
① 先设置GD32DFU的udev权限;
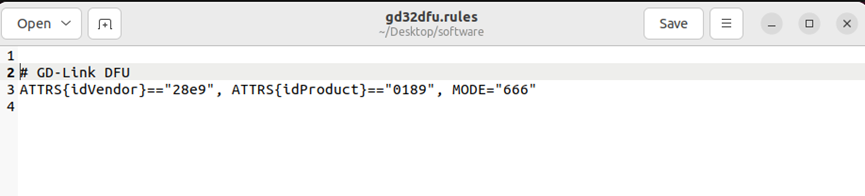
新建rules文件,例如gd32dfu.rules,在文件中写入以下内容
#GD-Link DFU
ATTRS{idVendor}=="28e9", ATTRS{idProduct}=="0189", MODE="666"
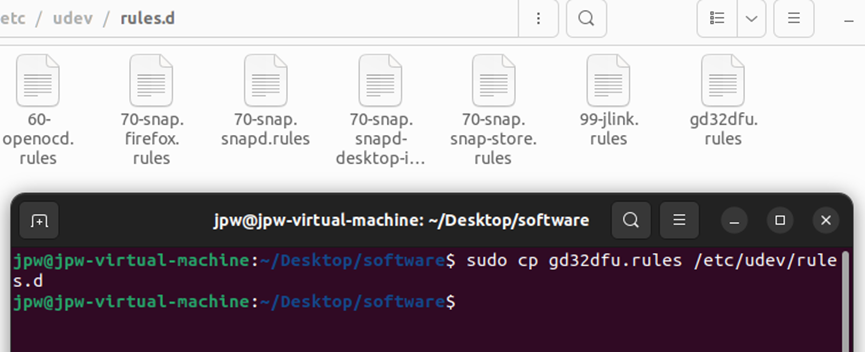
然后将该文件复制到/etc/udev/rules.d路径中
② 重启Ubuntu让规则生效,之后可使用Betaflight地面站对GD32F4飞控进行固件更新。
(声明:本文内容及配图由原作者撰写本网站转载,如有内容侵权或者其他违规问题,请联系本站处理。)

电 话:+86 755 8624 2231
邮 箱:reecam@reecam.net
地 址:深圳市南山区西丽街道打石一路国际创新谷1栋B座1502
公交:地铁5号线留仙洞C出口→37/M176/M429路,中兴人才公寓东站下对面

